Robovis Machine Vision可以自动组装复杂的管道部件
将机器视觉与六个轴机器人集成,允许自动组装复杂的管道部件。
作为世界上一些最着名的管道和供热剂的业务合作伙伴,Pegler Yorkshire Group提供了许多不同尺寸和配置的管件。当制造铜和黄铜弯头接头,T恤和阀门时,必须在成品运送到客户之前组装各种部件。betway必威备用
由于各种零件和相对较小的批量批量尺寸Pegler Yorkshire需要设计和构建高度灵活的装配系统,该系统可容纳宽范围的零件,仅限于尺寸(例如15mm或22mm)。为了将组件机构零件送入这些机器Pegler Yorkshire选择Kawasaki Robot UK提供机器人和FS系统,以提供自动化此任务的视觉系统。
零件从任何一个碗或料斗进料器喂入到200mm宽的传送带上,从5m / min运行,从部件体向机器人呈现给机器的机器人,以便拾取到机器中的夹具中。FS系统的ROBOVIS系统用于拍摄传送器和通过组件的图像,该图像坐标用于拾取的机器人,首先确定可以在没有机器人与相邻部分碰撞的情况下拾取的输送机的端部的部分。当输送机传感器检测到部件时,输送机停止,因此可以从固定位置拾取部件。这对于可能滚动的圆柱形部件尤为重要。选择合适的传送带以限制部件的轧制,并最大限度地减少回波返回相机的反射。
多达10个不同的部件可以随机位于输送机的260×200毫米区域。对于机器人系统正确地定位每个部分正确地定位,照明起到了重要作用。因为黄铜和铜部件是镜面,因此它们难以亮起。该系统还必须补偿来自传送带上可能存在的生产过程的金属片段。
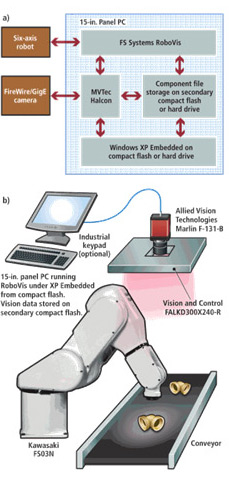
 环灯不适合这种应用,因为光在圆柱形部分上的光线反射,这取决于其在皮带上的位置,使得难以在观看区域的良好,一致性上获得图像。“相反,FS系统签订了视觉和控制以构建定制300×240毫米,630-nm(红色)LED面板(Falkd300x240-R)放置在输送机上方约1米。通过将相机放在该面板的中心,可以通过来自盟友视觉技术的Marlin F-131B Firewire相机捕获反射直接轴照明(后来的系统使用Basler Scout GigE摄像机)。然后将来自摄像机的图像转移到主机PC,其通过以太网接口从Kawasaki Robotics接口到六轴机器人的机器人控制器。在从输送机中拾取任何特定部分之前,系统必须确定最有效地选择哪个部分。在确定此之后,系统检查输送机上是否存在任何其他部件的任何潜在碰撞。如果没有这样的冲突,那么就挑选了部分;否则,机器人必须从输送机中挑选另一部分。如果没有挑选任何部件,则输送机先进,所有部件都将回收回料斗以进行重新呈现。
环灯不适合这种应用,因为光在圆柱形部分上的光线反射,这取决于其在皮带上的位置,使得难以在观看区域的良好,一致性上获得图像。“相反,FS系统签订了视觉和控制以构建定制300×240毫米,630-nm(红色)LED面板(Falkd300x240-R)放置在输送机上方约1米。通过将相机放在该面板的中心,可以通过来自盟友视觉技术的Marlin F-131B Firewire相机捕获反射直接轴照明(后来的系统使用Basler Scout GigE摄像机)。然后将来自摄像机的图像转移到主机PC,其通过以太网接口从Kawasaki Robotics接口到六轴机器人的机器人控制器。在从输送机中拾取任何特定部分之前,系统必须确定最有效地选择哪个部分。在确定此之后,系统检查输送机上是否存在任何其他部件的任何潜在碰撞。如果没有这样的冲突,那么就挑选了部分;否则,机器人必须从输送机中挑选另一部分。如果没有挑选任何部件,则输送机先进,所有部件都将回收回料斗以进行重新呈现。
在安装在Pegler Yorkshire组的Robovis系统中,可以挑选大约95%的零件,只能通过系统再循环5%。通过分析由相机捕获的图像来确定可以以这种方式挑选的部分。作为MVTEC软件的经过认证的集成合作伙伴,FS系统使用主机PC上运行的Halcon来执行嵌入Robovis软件的分析。
部分认可
在处理部件之前,必须校准系统。通过在已知位置处的机器人将已知的良好部分放置在传送带上,并且捕获图像。通过平滑图像来除去图像中的任何金属片段。为了识别部分的位置,然后将图像阈值阈值以分割管道配件。
在分割之后,使用几何形状识别函数来创建部分的数学模型。此时部分的位置称为基准位置。在操作中,系统在相机的视野中捕获多个管道配件的图像。再次,将平滑,阈值和几何形状识别算法应用于相对于机器人的基准位置来确定拾取协调。
ROBOVIS设计用于易于使用,也可以是操作员(选择要运行的部分)或作为机器制定者(创建新组件配方)。有必要开发一个用户界面,允许操作员在动作中可视化系统,修改高级图像处理功能,并在将系统放在生产中之前测试系统。
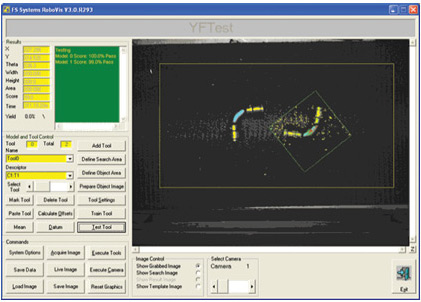
使用系统接口,操作员可以通过已知的对象区域进行校准系统,然后选择图像处理功能的数量和顺序校准系统。
可以看出对象,因为它们出现在传送带上,可以突出显示诸如阈值化的功能以显示系统将选择的对象以及其坐标(左上角)。使用模型和工具控制,操作员还可以使用已知的对象区域校准系统,并选择系统将运行的图像处理功能的数量和顺序。Pegler Yorkshire仅在英国,美国和匈牙利拥有超过15个Robovis系统。